Real Time Kinematic GPS has been a popular topic in Buggy Enhancement Grant proposals. As more teams are expressing interest in building out their own data loggers, I wanted to share some info on two proven systems that will allow you to get centimeter level accurate data from the buggy course.
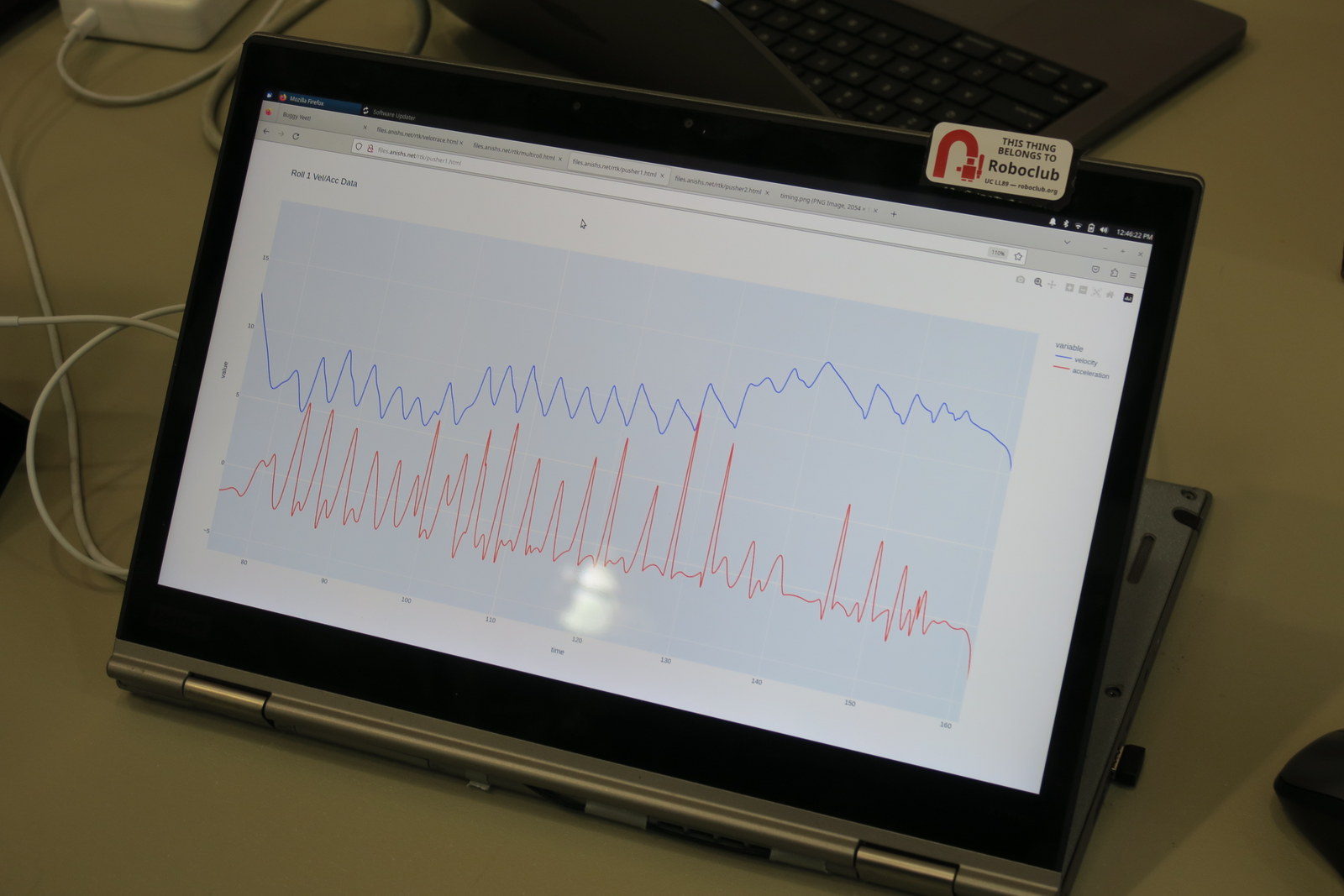
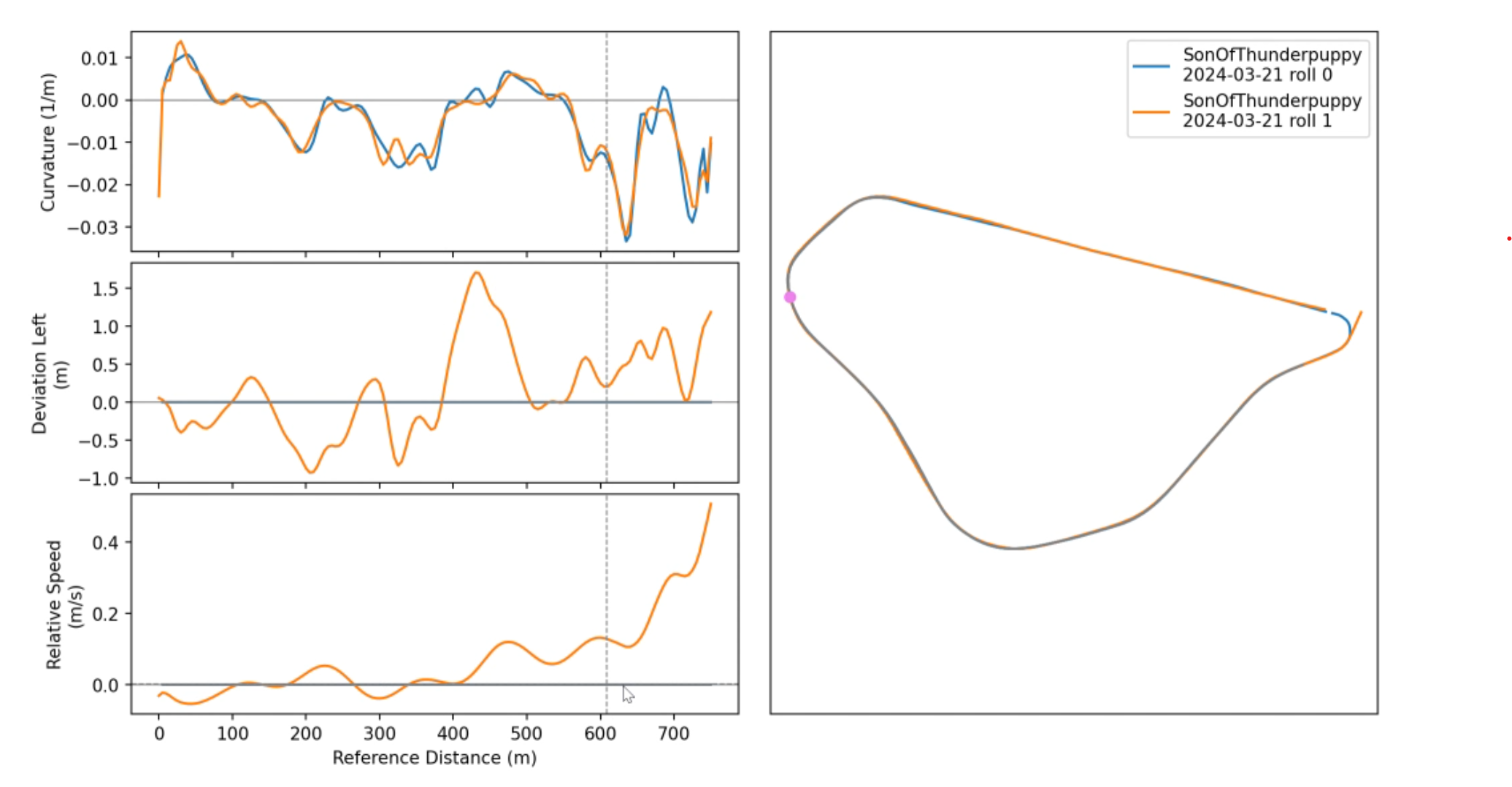
This quality of data opens a lot of opportunities, and I’m sure we’ve still only seen the tip of the iceberg. Drivers can clearly see the differences in their line between rolls and quantitatively compare the rollouts. Mechanics can see where and how much energy is lost in different parts of the course to fine tune the steering configurations and tire treatments. Pushers can automatically collect split times and even drill down into technique and how much power was delivered during a transition shove.
If this has you feeling inspired, I hope you’ll consider applying for a Spring 2025 Buggy Enhancement Grant. Applications are due by midnight on Thursday, January 23rd.
Arduino Based System
This system was developed by the CMU Robotics Club. Detailed documentation can be found in the project GitHub: https://github.com/CMU-Robotics-Club/rtk-datalogger Note that some soldering will be required. For specifics on where to purchase components and other tips and tricks for getting started with RTK, please refer to the Onboarding Doc.
I would have liked to recommend purchasing a ZED-F9R for the built in accelerometer and ability to integrate wheel rotation and steering input sensors, but that might require changes to the PCB design and updates to the firmware.
| Part | Cost |
| Seed Studio RP2040 | $4 |
| SparkFun ZED-F9P | $250 |
| GNSS Antenna | $73 |
| USB Breakout Board | $5 |
| SD Card Reader | $4 |
| OLED Board | $14 |
| USB-C Battery Pack | $20 |
| SD Card | $12 |
| PCB | See GitHub |
| Total | $382 |
Raspberry Pi Based System
This system does not require any soldering. We’re working on building out a set of scripts to automate the setup, post processing, and gathering logs from a fleet of devices over WiFi. Keep an eye on the project GitHub and reach out if you are interested in the beta. For specifics on where to purchase components and other tips and tricks for getting started with RTK, please refer to the Onboarding Doc.
| Part | Cost |
| Raspberry Pi Zero W 2 | $18 |
| ZED-F9R Dead Reckoning Pi Hat | $290 |
| GNSS Antenna | $73 |
| USB-C Battery Pack | $20 |
| SD Card | $12 |
| Total | $413 |
Special Thanks
I want to thank Anish Singhani and Delaynie McMillan as the original authors of the Buggy Enhancement Grants that made this possible and for the incredible amount of work that RoboBuggy and Radio Club put into establishing and maintaining the RTK base station on campus.
Thank you to all of our Golden Goose Lifetime Members who have donated to the Buggy Endowed Fund and made Buggy Enhancement Grants possible.
Thank you, Robbie, and Lewis, for helping me put together all the pieces for this BoM.
Thank you to everyone who has already submitted their Spring 2025 Buggy Enhancement Grant applications! If you haven’t submitted yours yet, applications are due by midnight on Thursday, January 23rd.